モーター解説
日頃より本コンテンツをご利用いただきありがとうございます。
今後、下記サーバに移行していきます。お手数ですがブックマークの変更をお願いいたします。https://kousyou.synology.me
機械設計者でもっとも難題なものの一つは、モーターです。 モーターを使用する場合、シリンダーと比べて電気制御に与える影響は大変大きなものになります。
少し話が脱線しますが、通常の産業機械など電気設計は、まず何から始めるかというと 機械にどのようなI/O(アイオー)が必要か? (IN, OUTの略です。) INNが入力、OUTが出力です。
たとえば シリンダーを1個 動かす為には最低バルブが1個、動作確認の出、戻りに各1個 必要です。 そうするとバルブに送るためのOUT信号が2個 確認センサーの信号を受け取るのに2個で INN2個、OUT2個と言う具合にI/Oをかぞえます。
シリンダーはこれだけです。 ですから直接 PLC(プログラム、ロジック、コントローラー)のカードから入出力が出きるので、さほどスペースもとりません。 1個数が間違って数をかぞえてもさほど影響は出ません。
しかし、モーターは別です。 動力源が必要です。シリンダーの動力源はエアーなので制御のハードには関係ありません。
機械設計者はつい、モーターなんて線をつなぐだけだろうと思う人が多いのには困りものです。 動力源はシーケンサーのように半導体を動かす微電力のようなわけにはいきません。文字通り動力なので大きな電力が必要です。
そのために制御盤のなかに大容量の電力を取り込まなければならずその分のブレーカー、トランス、始動用ユニットが必要となり、盤の中の配置、コストに多大なる影響を及ぼします。 と言うことをまず、おぼえてください。
モーターで動かすものは機械であり、慣性とか摩擦を検討するのは機械専門であり制御部分に関しては電気の専門範囲であることから全体としてのシステムがうまくできないと言うこともたびたび発生します。
私自身もモーターにはいつも、悩まされます。 ここでは機械設計者として知っておくべきことに主眼をおいて解説してあります。
 直流と交流
直流と交流
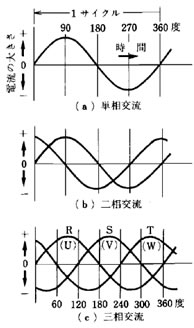
工場や家庭に配られている電力はすべて交流です。 交流は右図に示すように時間に対して正弦波状に+,一 に変化する。
1秒間に変化する回数を周波数といい、単位ヘルツ[Hz〕で表します。
直流は時間に対して方向を変えない電力です。
交流は単相、二相、,三相の3種類があり単相は家庭用、三相は工場用,二相は制御用に使用されます。
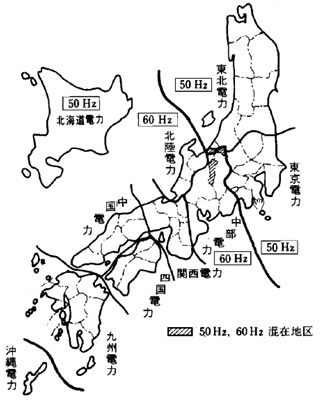
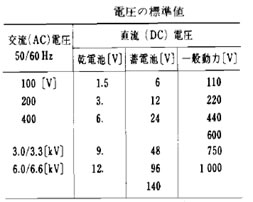
電圧と周波数
電圧の大きさを表わす周波数の分布を下に示します。 電動機ごとに必ず銘板に記されている範囲内で使用するようにしてください。
直流モーター (DCモーター)
 |
左図のように上(黄色)にだけ電気を流す。 上がN極になり、鉄芯はつながっているので下の左右の鉄芯はS極になる。 すると永久磁石と引き合って、口ーターが回り始める。
|
 |
左のコイルには電流が流れないが、ほか2つには流れ、右 上がN極、右下がS極になって、永久磁石と引き合う。
|
 |
下のコイルだけに電気が流れてS極になっている。ほか2つはN極になっていて、永久磁石と引き合う。
|
 |
右のコイルには電流が流れないが、ほか2つには流れ、左上がN極、左下がS極になっていて、永久磁石と引き合う
|
左図のように上(黄色)にだけ電気を流す。 上がN極になり、鉄芯はつながっているので下の左右の鉄芯はS極になる。 すると永久磁石と引き合って、口ーターが回り始める。
左のコイルには電流が流れないが、ほか2つには流れ、右 上がN極、右下がS極になって、永久磁石と引き合う。
下のコイルだけに電気が流れてS極になっている。ほか2つはN極になっていて、永久磁石と引き合う。
右のコイルには電流が流れないが、ほか2つには流れ、左上がN極、左下がS極になっていて、永久磁石と引き合う 直流モーターは上のように、電磁石からなる回転子(ローター)と永久磁石あるいは電磁石か らなる 固定子(ステーター)で構成される。
回転子と固定子の磁力により反発・吸引を繰り返し、回 転力を生み出す。
このままでは回転しないから、回転子の角度により電流の流れる方向を順番に変えることにより、回転力を生み出す。
回転子は回転しているわけであるから、接触子と整流子との間は回転中は常に摩擦が 発生し、 接触子と整流子の両方が摩耗する。
摩耗が進んで隙間ができると電流が流れなくなり、回 転しなくなるから、整流子と接触子の両方を交換しなければならない。 しかし、整流子を交換するには、回転子の軸を一旦外すなどの作業が必要となり、しかもコイルに 接続されているうえ、どの位置にあるかわからないため、交換は非常に困難である。
そこで、接触子 を摩耗しやすい材質である炭素(カーボン)などで作ることにより、整流子の摩耗を減らし、接触子 を摩耗させることにより、接触子を定期的に交換することで、整流子は寿命まで交換する必要がな くなる。
接触子の交換はおおよそ5000時間ごとが一般的である。安全を見込むと約半年ごとに交換しなけ ればならないことになる。
そこで、直流モーターの回転子と固定子を反対にする。 すなわち、固定 子を電磁石、回転子を永久磁石にすることにより接触子も整流子も必要なくなる。
しかし、このまま では回転しないから、電流を流すコイルを回転子の角度に応じて切り替えてやらなければならな い。
回転子の角度を検出するためには、何らかのセンサーを用いれば良いが、もともと回転子は永 久磁石であるため、磁気センサーを使えば、回転子に何も細工しなくても、回転子の位置が読みと れる。
こうして接触子(ブラシ)交換の手間を省き、接点がなくなったために電気雑音(スパーク・ノイ ズ)の発生をなくしたモーターがDCブラシレス・モーターである。
直流電動機(DCモータ)の回転速度は、磁界の強さを変化させることにより制御できる。
モータのコイルの磁界の強さを変化させるには、電流を変化させれば良いし、固定子の磁界の強さを変化させるには距離を変化させれば良い。
交流モーター (ACモーター)
電磁誘導モーターの原理 磁石で円盤を挟み回転方向へ移動させると円盤も非接触状態でそれにつられて回転する。 これを右の形状のように変形させたものが原型になります。
軸Bには磁石が埋め込まれていて軸Aの円盤に相当する カップは銅、またはアルミでできています。 これをさらに変形させて外と中を入れかえて永久磁石の代わりにコイルで代替えすると電磁誘導モーター(ACモーター、インダクションモーター)になります。
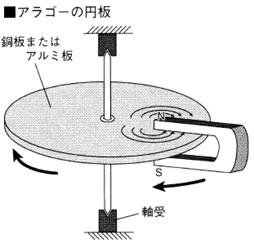
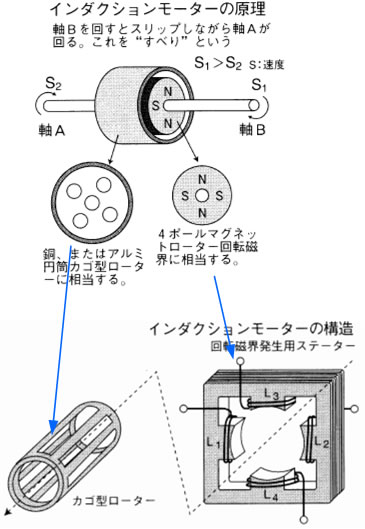
磁石を回転させる代わりにコイルへ流す電気が廻ります。 交流を流すということです。
誘導電動機は、交流の周波数に同期した回転数が得られるため、比較的安定した回転数が必要 な動力源として使用される。その回転数は周波数に比例することはもちろんであるが、電動機その ものの極数にも比例する。
同期電動機はローターに永久磁石を使用したものであり、誘導電動機のように負荷による速度変化は生じない。
回転数を任意に変化させたい場合は、周波数を変える必要がある。 そこで、交流をいったん直流に変換(整流)し、それを必要な周波 数の交流に変換することにより、交流電動機を任意の回転数で使用することができる。このしくみが 「インバータ」です。
直流(DC)モーターの交流(AC)モーター比較
| 直流(DC)モーター | 交流(AC)モーター | |
|---|---|---|
| モーターの構造 | 複雑 | 比較的簡単 |
| 整流メカニズム | ブラシ、コミューターによる有接点式 | 半導体等による無接点式 |
| 大パワー化 | 一般に難しい | 容易 |
| 高速化 | 困難 | 容易 |
| 低速化 | 一般に容易 | 一般に容易 |
| 回転ムラ | 一般に容易 | 一般に少ない |
| トルクムラ | 一般に多い | 一般に少ない |
| 出力効率 | 一般に良い | 一般に悪い |
| 制御回路 | 比較的容易 | やや難しい |
| 回転中の振動、騒音 | 一般に多い | 一般に少ない |
| クリーン度 | 悪い | 良い |
| 寿命 | 短い | 長い |
極数と回転速度
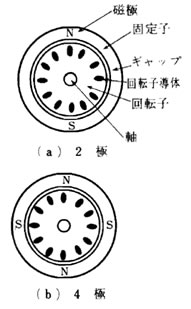 極数とは、電動機の中にできる磁極の数です。(ほとんどが磁石の数)
(a)のように、ギャップ面上にNS一対の磁極ができるものを2極、(b)図のように2対の磁極ができるものを4極と数える。
極数とは、電動機の中にできる磁極の数です。(ほとんどが磁石の数)
(a)のように、ギャップ面上にNS一対の磁極ができるものを2極、(b)図のように2対の磁極ができるものを4極と数える。
以下同様に、偶数であればいくらでも多 い極数が作れる。
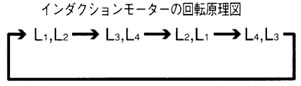
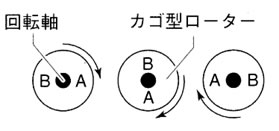
三相巻線に三相交流を流すと、極数に応じて磁界がで き電流の変化にともなって回転する。これを回転磁界と呼ぶ。 その速さは、半サイクルごとに次の極へ移るので次式で表される。
ここで、ns: 同期速度〔rpm]、f:周波数〔Hz]、p: 極数 この速度を同期速度という。 周波数と極数との関係を下表に示す。
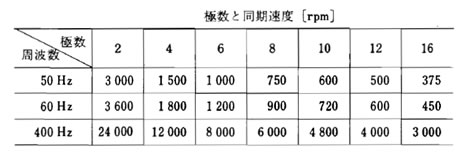
同期電動機は、この同期速度で回転する。 誘導電動機は、同期速度より数%低 い速度で回転する。この差をすぺりという。 このように交流電動機は極数と回転速度の間に密接な関係があるが、直流電動機の場合にはまったく関係がない。
逆に言うと電流値と負荷により回転数の制御がしやすいと言うことです。 また、直流電動機は寸法によってだいたい極数が決まり、小さいものは極数が少なく、大きいものは極数が多句なります。
モーターの速度、トルク特性
 電動機は、負荷の変化に応じてトルクが出るが、トルクの大小によって速度が変わるのが普通です。
電動機は、負荷の変化に応じてトルクが出るが、トルクの大小によって速度が変わるのが普通です。
たとえば誘導電動機では、無負荷のとき はトルク0で、ほぼ同期速度で回転するが、負荷をかけると電動機はトルクを出すとともに回転速度が少し落ち、さらに負荷を増すと、ある値までは回転速度が下がるとともにトルクを増すが、 やがてモーターのトルク最大値以上では止まってしまう。 この状況を右図に 示す。
このような、電動機のトルクと速度の関係を速度-トルク特性といい、ある負荷に対してどのような電動機を選定するか検討する基本的な要素である。
各ポイントにおける速度やトルクには次のように用語が決められている.
(1)定格トルク : 定格出力のときのトルク
(2)定格速度 : 定格出力のときの回転速度
(3)始動トルク : 電動機が回り始める瞬間に出すトルク
(4)停動トルク : トルクの最大値を最大トルクと呼ぶが、普通の誘導電動機ではこのトルク以上の負荷を かけると電 動機は不安定領域に入り停止するので、この最大トルクを停動トルクという。
(5)無負荷速度 : 電動機に負荷をかけないときの回転速度
(6)同期引入トルク : 同期電動機を始動して,同期速度に入るときのトルク
(7)同期脱調トルク : 同期運転している同期電動機に負荷をかけていくと、負荷の増大によって同期回転 を保つことができなくなり同期はずれを起こす。 この同期はずれを脱調といい、このときのトルクを 脱調トルクと呼ぶ。
無負荷から定格トルク付近までの間で速度があまり変化しない特性を定速度特性(直流分巻電動機、誘導電動機、同期電動機など)速度の変化の大きい特性を変速度特性(直流直巻電動機、高抵抗誘導電動機など)という。
全負荷速度(定格)をn、無負荷速度をn0としたとき
これを速度変動率といい電動機の速度変化の程度を表します。
速度変動率の小さいのが定速度特性、大きいのが変速度特性となります。
負荷の速度 - トルク特性
 負荷を駆動するのに必要なトルクも速度によって変化する。
負荷を駆動するのに必要なトルクも速度によって変化する。
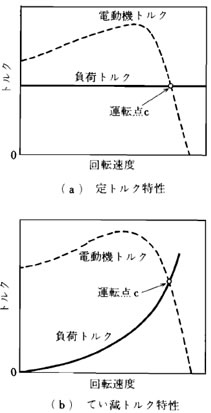
たとえば、ファンの回しはじめは、ほとんどトルクを要しないが、速度を増すにしたがって著しくトルクを必要とする。 これを図示したのが右図で、これが負荷の速度 - トルク特性である。
負荷の速度-トルク特性には、2種ある。
1、定トルク特性: 速度が変わっても、トルクの大きさが変化しないもの。 たとえば、巻 上機、起重機、レシプロコンプレッサ、各種ロールなど
2、てい減トルク特性: トルクが速度の低下とともに減少する負荷。 たとえば流体を動かす送風機、ポンプなどで、この場合は速度の2乗に比例する。
負荷の速度-トルク特性は、電動機の特性を決めるのに重要であると同時に、電動機の構造形式、特に冷却方式の決定にも重要なポイントになる。 たとえば、2乗トルク特性負荷を可変速する場合、動力は、速度の3乗で変化するので、減速したとき電動機内部の損失が小さくなる。
したがって、自力通風形で低速範囲の冷却を特に考慮しなくてもよいなど電動機の価格にまで影響を及ぼす。
電動機と負荷との両方の速度-トルク特性を同一座標上に描いた場合、両曲線の交点が運転点である。
出力、入力、力率、効率
1)出 力
電動機の出力はワット〔W〕またはキロワット〔kW〕の単位で表し、次の関係がある。
1〔W〕 = 1〔J/s〕 = 1〔N・m/s〕 = 1/9.8〔kgf・m/s〕
1〔HP〕馬力 = 746〔W]
また、電動機の出力P0〔W〕、回転速度n〔rpm〕よりトルク T は次式で計算できる。
T = P0/1.027・n[kgf・m] = P0/0.1047・n〔N・m〕
定格出力は定格電圧、定格周波数で、もっとも良好な特性を発揮しながら運転できる出力の値であって銘板に記載されている。
定格出力は最大出力ではありません。 定格出力時の回転速度、電流がそれぞれ定格回転速度、定格電流でこれらも銘板に記されている。 定格出力の状態を全負荷、空まわしを無負荷、定格出力以上の状態を過負荷といい、定格に対する比で表すのが普通です。
2)入 力
電動機がある出力で運転しているとき、電源から流入する有効電力を入力という。
電動機端子電圧 V 〔V〕で電流 I 〔A〕が流れているとき、入力 Piは次式のになる。
直流の場合 Pi = VI 〔W〕
単相交流の場合 Pi = V・I・cosφ〔W]
三相交流の場合 P =
3) 力 率
交流入力の場合、同じ直流入力に対して 1/cosφ(0< cosφ <1)倍だけ大きい電流が流れる。
このcosφを力率という。
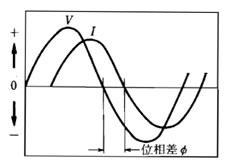 交流の電圧と電流とは正弦波状に変化するが、電動機の電圧と電流の変化の間には
、ずれがあって右図のように電流が電圧の変化より遅れる。 この遅れを電気角φで表しその余弦cosφが力率 という。
交流の電圧と電流とは正弦波状に変化するが、電動機の電圧と電流の変化の間には
、ずれがあって右図のように電流が電圧の変化より遅れる。 この遅れを電気角φで表しその余弦cosφが力率 という。
このため、V X I がすべて有効電力にならないで、Vlcosφが有効な電力となる。
力率のよいほど、すなわち遅れ角度φが小さいほど少ない電流で多くの電力を伝えることになる。 電動機容量が大きくなると、この力率による電流の増加が無視できない値となるので電源の負担を軽くするために力率改善が行われる
4) 効 率
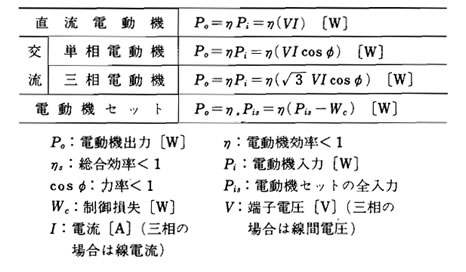
有効入力のうち一部は電動機内の損失として消費され P0 = ηPi 〔W] が出力として軸から出る。 この出力と入力との比ηを効率という。ηは必ず1より小さい値である。 電動機内部損失は「入カー出力」で鉄損,銅損,機械損などに消費され、電動機の温度上昇の原因になる。 電動機セットでは御制入力も加算し、制御装置内損失や付加装置の損失も考慮して効率が求められる。 これを総合効率という。
5)出力・入力・電圧・電流・力率・効率の関係
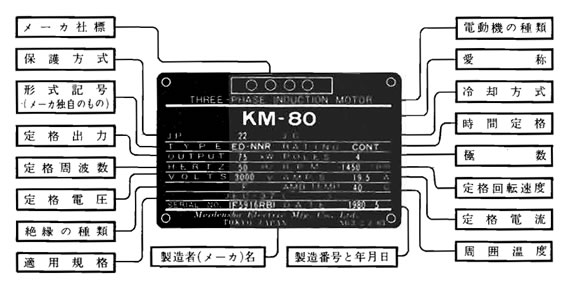
6) 銘 板
銘板の例を示します。
 >>
>> 